Robot per la riparazione immediata di piccole buche stradali senza operazioni preliminari
- Concepito per autostrade e strade con traffico elevato
- Prolunga la vita utile della pavimentazione con interventi rapidi su piccole buche, evitandone l'ulteriore degrado
- Consente all'operatore di rimanere in una zona sicura


Il robot é stato costruito nel corso del progetto InfraRob: Maintaining integrity, performance and safety of the road infrastructure through autonomous robotized solutions and modularization, un progetto Horizon 2020 finalizzato alla automazione, robotizzazione e modularizzazione dei lavori di costruzione e di manutenzione delle strade. In particolare, InfraROB sviluppa sistemi e macchinari robotizzati autonomi per eseguire la tracciatura della segnaletica, la ripavimentazione e la riparazione di crepe e buche. Sviluppa inoltre sistemi di sicurezza robotizzati collaborativi per gli operai edili e gli utenti della strada.
AIPSS, insieme ai suoi associati Centro di Ricerca per il Trasporto e la Logistica CTL) dell'Università di Roma La Sapienza e Dipartimento di Ingegneria dell'Università ROMATRE è leader del WP3 "Autonomous Robotized Machinery for the Routine Maintenance of Pavement & RPxS for Safer Operations" e responsabile dello sviluppo del "Robot to repair potholes and cracks during asphalt routine maintenance"
Data di avvio: 1 Settembre 2021 ---- Data di completamento: 28 Febbraio 2025
Finanziamento UE: EUR 5.005.648,75 - Vai al sito ufficiale del progetto (in Inglese)


Il robot utilizza una particolare miscela bituminosa a freddo e autocompattante, costituita da 100% asfalto riciclato e un particolare additivo fornito da ITERCHIMICA SpA. Questa miscela consente di riempire buche di piccole dimensioni senza alcuna operazione preliminare; la compattazione viene effettuata dagli pneumatici dei veicoli che vi passano sopra. La miscela non aderisce agli pneumatici, come mostrato nel video di destra.
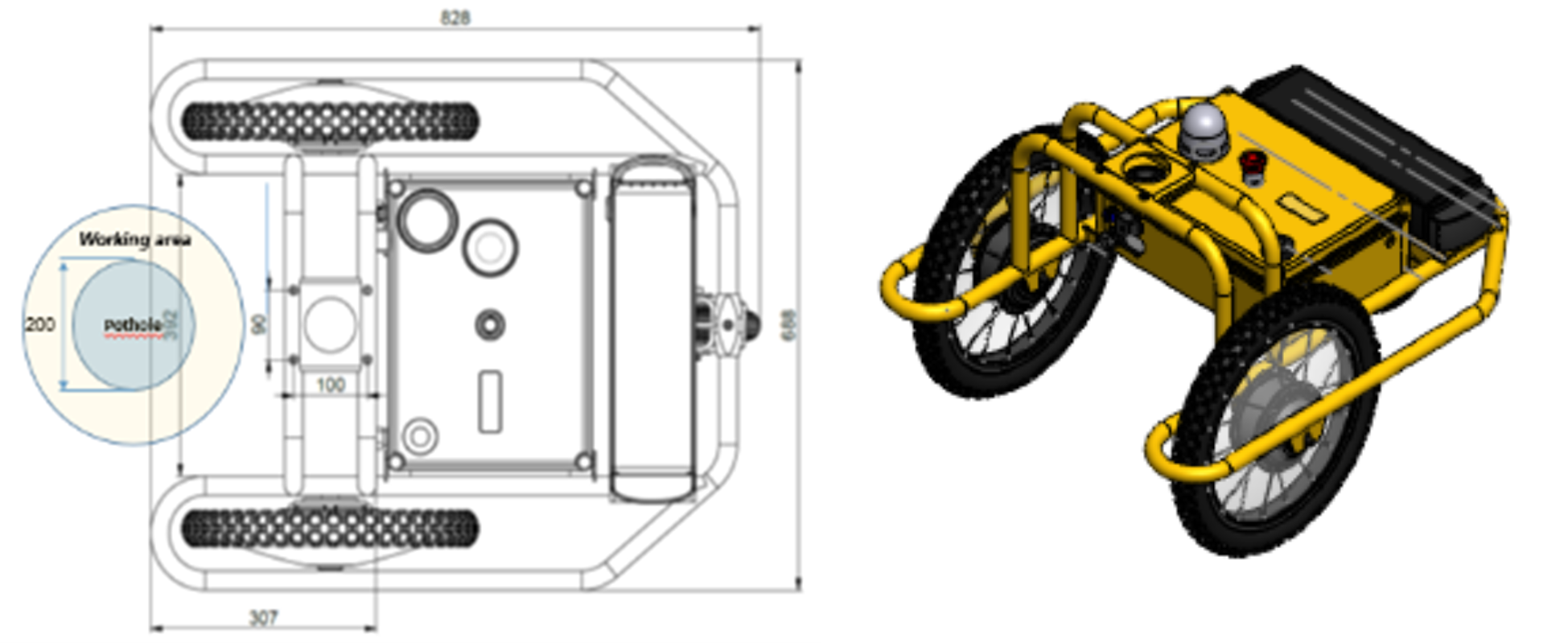
Il carrier autonomo é stato fornito dal partner di progetto Tiny Mobile Robots (DK)si tratta di un modello autonomo per la pre marcatura di segnaletica orizzontale. Nella foto la versione originale, che é stata successivamente utilizzata per l'integrazione con il sistema di estrusione della miscela bituminosa e con il software dedicato
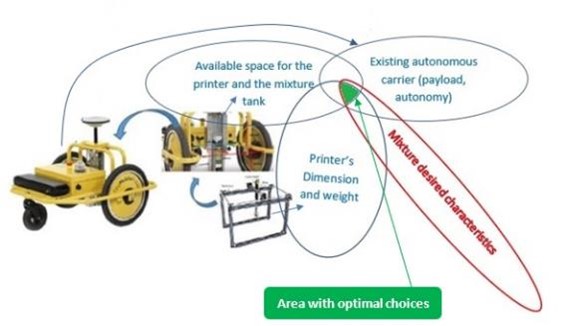
La scelta della miscela ottimale doveva rispettare diverse condizioni; alcune note in partenza (carico utile del carrier autonomo e spazio disponibile per l'integrazione della stampante e del serbatoio con la miscela), mentre altre erano sconosciuti (dimensioni e peso della stampante). Nella figura la porzione in verde mostra l'area delle scelte ottimali per le caratteristiche della miscela.
Tutta la ricerca che ha portato alla definizione finale della miscela é riportata in questa pubblicazione scientifica (clic sull'immagine per aprire il file)
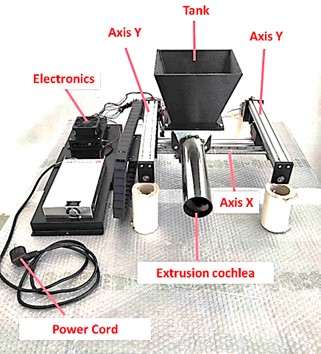
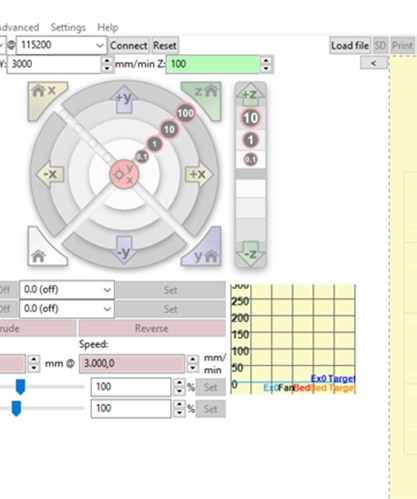
Una volta definita la miscela ottimale, é stata progettato un sistema di estrusione compatibile con le caratteristiche della miscela stessa, in modo da garantire una adeguata deposizione all'interno della buca. E stata utilizzata, con opportuni adeguamenti, la tecnologia delle stampanti 3D tramite la società 3D Mark One, eliminando l'asse verticale perché superfluo date le dimensioni delle buche da riempire. Nella figura a sinistra il sistema di estrusione completo di serbatoio per la miscela e a destra una schemata del pannello di controllo del sistema


 Il passo successivo é stato l'integrazione meccanica del sistema di estrusione con il carrier autonomo e quindi l'integrazione dei software di controllo dei due sistemi. Nelle figure sopra alcune immagini del sistema integrato
Il passo successivo é stato l'integrazione meccanica del sistema di estrusione con il carrier autonomo e quindi l'integrazione dei software di controllo dei due sistemi. Nelle figure sopra alcune immagini del sistema integrato
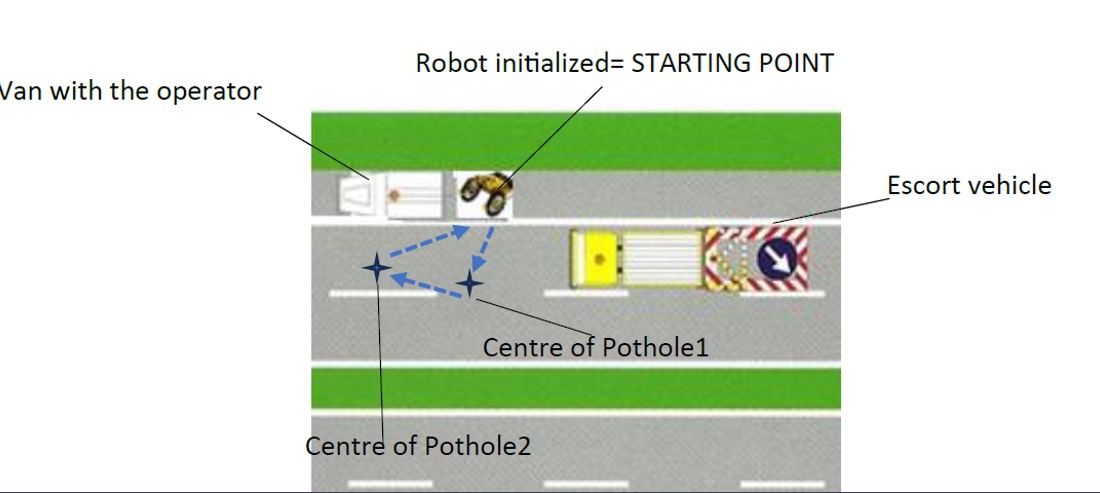
Schema dellle operazioni previste per la riparazione veloce di piccole buche: un furgone contenente il robot e la miscela specifica arriva sul posto seguito dal veicolo di scorta. L'operatore parcheggia in una zona sicura adiacente alle buche da riparare, scarica il robot e lo inizializza; quindi il robot si dierige verso la prima buca e effettua la riparazione; una volta terminato, ripete l'operazione sulla seconda buca e poi ritorna, sempre in maniera autonoma, al punto di partenza. L'area delle operazioni é protetta dal veicolo di scorta dotato di apposita segnaletica


Prove su strada del robot autonomo nella sua versione per la riparazione di fessure nel manto stradale
Vai al sito web del progetto (in Inglese)